มหาวิทยาลัยญี่ปุ่นพัฒนาเทคนิคมือหุ่นยนต์ ประกอบชิ้นส่วนได้ไม่พึ่ง Jig
- Share :



- 992 Reads
Mr. Yasuyoshi Yokokouji ศาสตราจารย์ Kobe University ร่วม Mr. Hiroshi Dobaki วิทยากร Wakayama University และคณะ พัฒนาเทคนิคการใช้มือของหุ่นยนต์อุตสาหกรรม ด้วยโครงสร้างมือแบบ 4 นิ้วซึ่งมีความเรียบง่าย ให้สามารถจับ และประกอบชิ้นส่วนเช่นชุดเฟืองได้ด้วยมือเดียว และไม่ต้องใช้ Jig ในการจับยึดชิ้นส่วน และใช้การวัดอย่างแม่นยำในระดับไมโครเมตร ทำให้สามารถใช้ในการประกอบชิ้นส่วนที่ต้องการความละเอียดในการประกอบสูงได้
มือหุ่นยนต์ถูกออกแบบให้มีนิ้วสำหรับหยิบจับรวม 4 นิ้ว มือมีโครงสร้างเรียบง่าย และเน้นไปที่การพัฒนาเทคนิคในการจับชิ้นงานแทนการพัฒนามือหุ่นยนต์ ซึ่งนิ้วทั้ง 4 สามารถหมุนชิ้นงานไปตามนิ้วเพื่อตรวจวัดและกำหนดตำแหน่ง และสามารถประกอบชิ้นส่วนได้อย่างแม่นยำ แม้ชิ้นส่วนจะถูกวางไว้อย่างไม่เป็นระเบียบก็ตาม
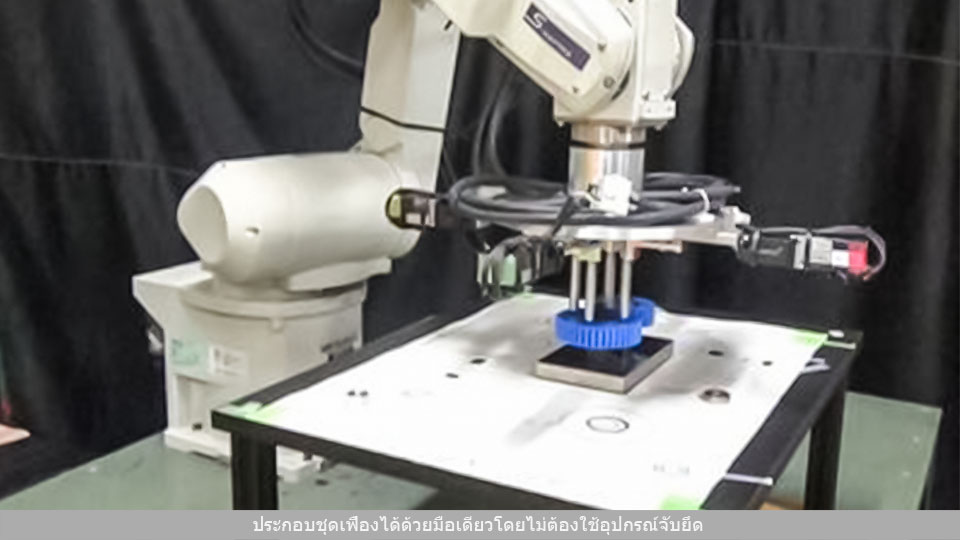
ที่ผ่านมา “World Robot Summit (WRS)” ระบุให้การประกอบชุดเฟืองเป็นโจทย์ที่มีความท้าทายสูง เนื่องจากมีองค์ประกอบที่จำเป็นจำนวนมาก จึงได้ยกให้ความสามารถในการประกอบชุดเฟืองของมือหุ่นยนต์เป็น Benchmark หนึ่ง และจัดให้มีการแข่งขันประจำในการประกอบชุดเฟือง ซึ่งพบว่า การประกอบชุดเฟืองด้วยมือหุ่นยนต์โดยไม่ใช้ Jig เป็นเรื่องที่ยากมาก
นอกจากนี้ เทคนิคที่พัฒนาขึ้นยังสามารถใช้ในการประกอบชิ้นส่วนจำนวนน้อยแต่มากแบบได้ ต่างจากที่แล้วมา หุ่นยนต์มักถูกใช้ในการจัดกลุ่มชิ้นส่วนและส่งต่อมากกว่าใช้ในการประกอบ และการใช้หุ่นยนต์ในการประกอบชิ้นส่วนให้ได้เป็นผลิตภัณฑ์ทั้งชิ้นจำเป็นต้องใช้มือหุ่นยนต์หลายประเภท
โดยทางคณะผู้พัฒนา มีกำหนดการณ์เปิดเผยรายละเอียดเกี่ยวกับเทคนิคที่พัฒนาขึ้นนี้ภายในงานวิชาการของ Robotics Society of Japan (RSJ) ต่อไป




