ปัญญาประดิษฐ์ ผู้ควบคุมหุ่นยนต์อุตสาหกรรมแห่งอนาคต
- Share :



- 1,582 Reads
ปัญญาประดิษฐ์ (Artificial Intelligence: AI) กำลังถูกพัฒนาให้มีบทบาทในการควบคุมหุ่นยนต์อุตสาหกรรมมากยิ่งขึ้น โดยปัจจุบันแนวโน้มที่กำลังได้รับความนิยม คือ การใช้การเรียนรู้เชิงลึก (Deep Learning) ในการฝึกหุ่นยนต์ให้สามารถหยิบจับ และเคลื่อนย้ายชิ้นงานได้ ซึ่งจะเป็นรากฐานสำคัญสู่การทำงานที่ซับซ้อนขึ้นในอนาคต ซึ่งการวิจัยในปัจจุบัน มีแนวทางอยู่ 2 แบบหลัก คือ การพัฒนา AI ให้เหมาะสมกับหุ่นยนต์อุตสาหกรรม และ การออกแบบหุ่นยนต์อุตสาหกรรมให้รองรับกับ AI ที่ถูกพัฒนาขึ้น เพื่อให้หุ่นยนต์สามารถทำงานได้ดียิ่งขึ้นในอนาคต
เลียนแบบมนุษย์
ศาสตราจารย์ Tetsuya Ogata จาก Waseda University ร่วมกับ Mr. Hiroshi Itou และคณะวิจัยจากบริษัท Hitachi พัฒนา AI ให้เรียนรู้การประกอบขั้นพื้นฐาน โดยใช้หุ่นยนต์แบบ 6 แกน ในการสอดเข็มเส้นผ่านศูนย์กลาง 7 มม. เข้าไปในรูขนาด 8 มม. ซึ่งพนักงาน จะทำหน้าที่ในการจับแขนหุ่นยนต์ให้ทำงานได้ก่อนในครั้งแรก จากนั้น AI จะเรียนรู้จากทักษะการทำงานของพนักงานคนนั้น ซึ่ง ศจ. ศาสตราจารย์ Ogata ชี้แจงว่า เทคนิคการพัฒนา AI รูปแบบนี้ จะช่วยลดจำนวนครั้งที่จำเป็นในการเรียนรู้ของ AI จาก 100 - 1,000 ครั้ง ให้เหลือเพียงครั้งเดียวได้
นอกจากนี้ คณะวิจัยยังพัฒนา AI ให้สามารถเรียนรู้กระแสไฟฟ้าจากมอเตอร์ได้เพียงแค่การหมุนข้อต่อ ทำให้ AI ที่แต่เดิมสามารถทำงานสำเร็จได้ 25% กลายเป็น 87.5% ซึ่งการเรียนรู้จากกระแสไฟฟ้าเช่นนี้ ทำให้หุ่นยนต์อุตสาหกรรมสามารถถอดเซนเซอร์ออก เพื่อลดน้ำหนัก หรือเปลี่ยนไปติดตั้งเซนเซอร์ชนิดอื่นแทนได้
Soft Robot
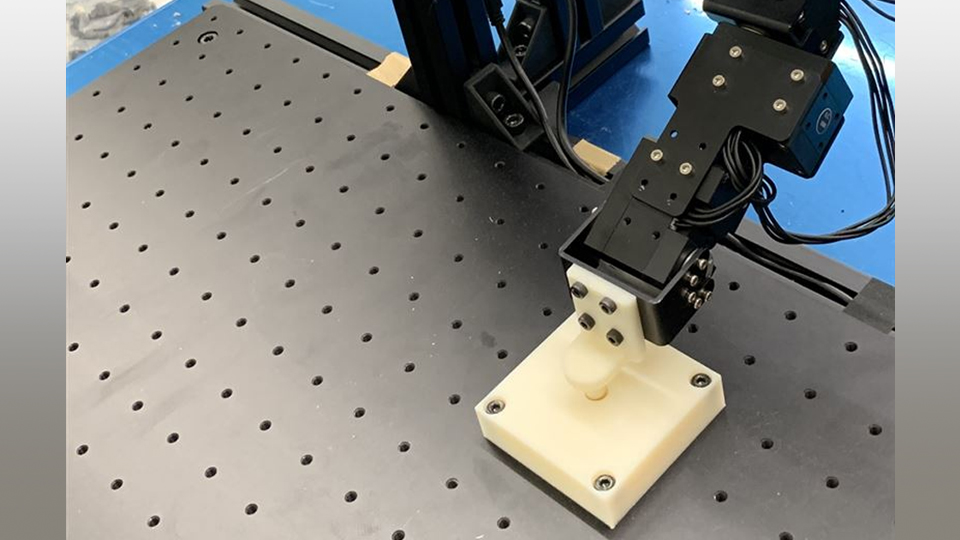
ศจ. Shuhei Ikemoto จาก Kyushu Institute of Technology ร่วมกับศจ. Kou Hosoda จาก Osaka University และคณะ พัฒนาหุ่นยนต์ CNC ให้รองรับการควบคุมผ่าน AI ที่ถูกพัฒนาขึ้น ซึ่งเป็นการทำงานแบบย้อนกลับ จากที่ส่วนมากเลือกพัฒนา AI ทีหลัง ซึ่งทีมผู้พัฒนาคาดการณ์ว่า หุ่นยนต์ประเภทนี้ จะรองรับการทำงานได้หลายรูปแบบ และเลือกพัฒนาหุ่นยนต์ให้มีความยืดหยุ่น หรือที่เรียกว่า “Soft Robot” ซึ่งเป็นหุ่นยนต์ที่ควบคุมได้ยาก แต่มีความปลอดภัยสูง และสามารถใช้ได้ในหลายสายการผลิต โดยหุ่นยนต์อุตสาหกรรมที่คณะวิจัยออกแบบขึ้นนี้ ติดตั้งข้อต่อแบบมอเตอร์เอาไว้รวมแล้ว 11 จุดด้วยกัน
อย่างไรก็ตาม เมื่อหุ่นยนต์มีความยืดหยุ่นสูง AI จึงประเมินว่าการควบคุมหุ่นยนต์ไม่สามารถทำงานได้อย่างมีประสิทธิภาพ ทีมพัฒนาจึงลงความเห็นว่า หากสามารถนำข้อดีของหุ่นยนต์แบบยืดหยุ่น และหุ่นยนต์อุตสาหกรรมทั่วไปมารวมไว้ด้วยกันได้แล้ว ก็อาจนำมาซึ่งการพัฒนาหุ่นยนต์อุตสาหกรรมที่รองรับงานได้หลายรูปแบบอย่างที่ไม่เคยมีมาก็เป็นได้